 023-68661681
023-68661681
 返回
返回

顺应性机制是一种通过弹性体变形实现力和运动传递的柔性装置。顺应性机制通过其构件的相对灵活性来获得运动。顺应性机制利用材料的弹性来移动,使其非常适合进行线性静态研究。在SOLIDWORKS Simulation线性静态算例中,结果必须保持在材料的线性弹性范围内,一旦停止所有加载,材料必须返回其原始形状。
案例讲解
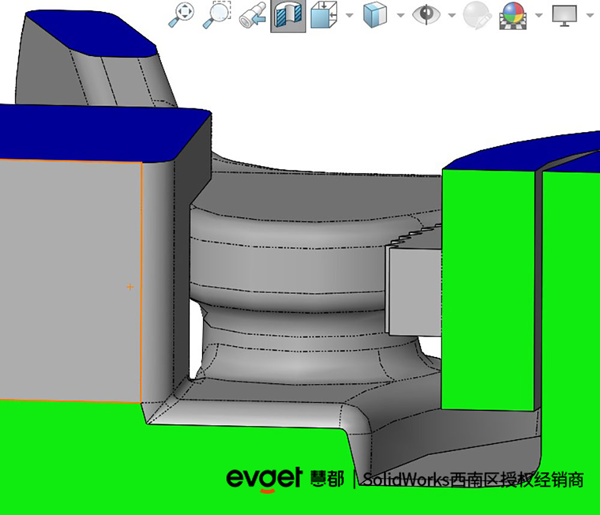
本文将带您进行验证顺应机制的仿真过程。下面这个案例,用于棘轮齿轮系统的棘爪将弹性变形以释放齿轮,如下图所示。通常,棘爪会有一个弹簧或锁来将其固定在适当的位置,但是我们将使用材料的弹性来代替。
这种设计面临的挑战是,在顺应性的连接点处要有足够的材料,不会引起屈服,但又要避免过多的材料,以至于需要费力移动它。
棘爪通过圆柱形挤压件连接到机械装置,如下图所示。按下拇指按钮时,由于圆柱挤压中的扭转位移,棘爪将释放。
如果将其推至最大运动范围,柔顺机制会发生屈服吗?
我解决此问题的方法是使用规定的位移来查看将棘爪推入零件所需的力,这将是其最大允许位移。这将是最坏的情况,如果兼容机制可以承受这种情况,那么正常运行就可以了。
由于我不知道要施加多大的力,但是知道我想要使棘爪移位多远,因此我使用了规定的移位夹具。如下图所示,这将使用边界条件使蓝色面围绕粉红色面的轴旋转大约四度。为了规定旋转位移,我必须从笛卡尔坐标系更改为圆柱坐标系。通过选择一个圆柱面作为我的参考方向(粉红色选择框)来完成此操作,如下图所示。
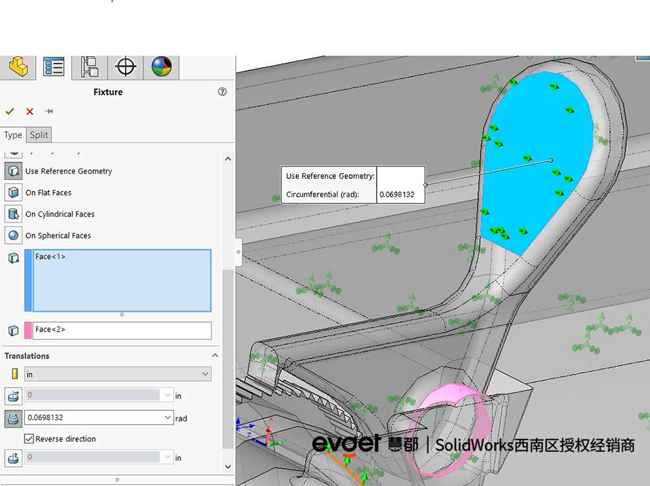
在模拟中,将施加理想量的力以使选定的面位移指定量。该变形将导致内部应力和应变,并将其与材料模型进行比较。在添加更多夹具以保持模型约束后,可以运行该研究。
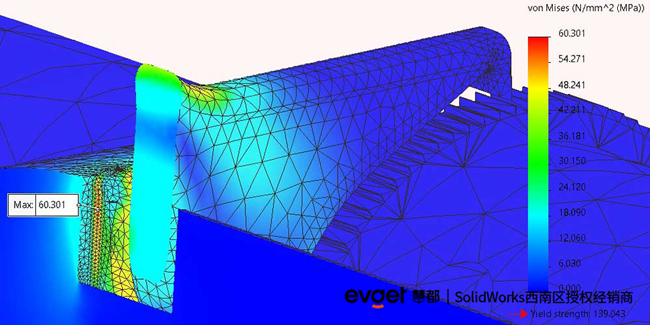
这项研究旨在测试顺应机制的运动范围,并确定使其最大化所需的力。我使用的失效标准是抗弯强度,因为该材料由于印刷过程而各向同性,这是我用于制造该零件的3D打印材料的强度数据。最大允许应力将为65 MPa,允许应变为15%。从这些图像中可以看到,将棘爪推到最大位置时,应力和应变低于材料极限。
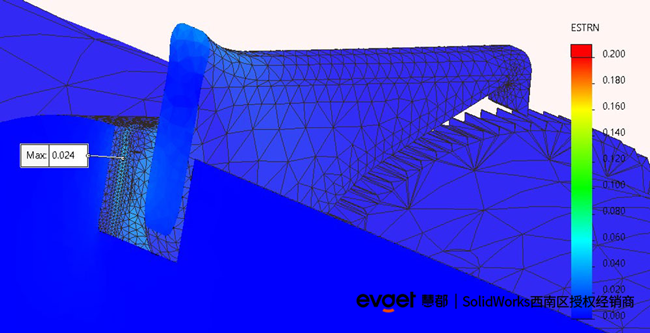
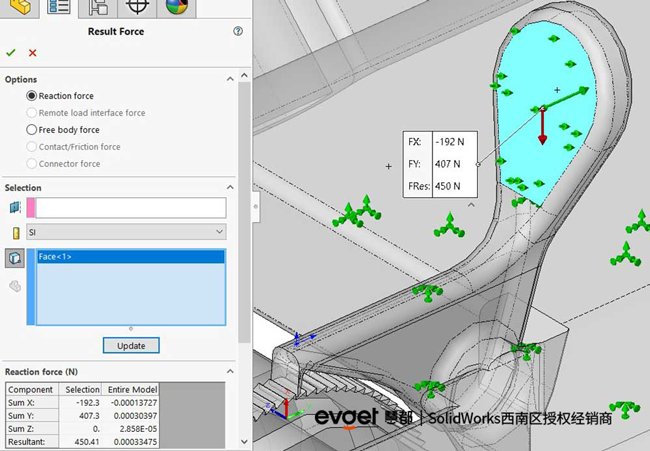
要了解将棘爪置于此最大位置需要多少力,SOLIDWORKS Simulation可以列出合力,如上图所示。结果力工具将告诉您在评估反作用力时需要多少力来确保夹具保持固定。为了将棘爪推到最大位置,总共需要450N。这个数字在人的握持能力的最高端,但这没关系,因为释放棘爪不需要此力。
从这些研究中,我们可以得出结论,顺应机制在其最大运动范围内不会塑性变形或屈服。
释放齿轮需要多少力?
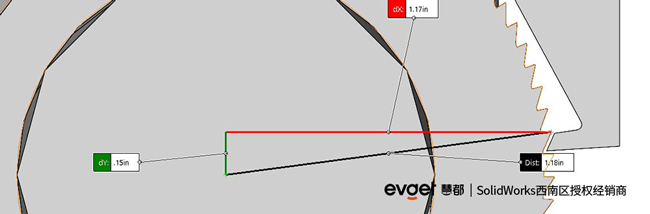
为了回答这个问题,我首先需要知道棘爪必须移动多远才能释放齿轮。我通过测量从齿轮中心到棘爪齿尖端的距离,然后减去齿轮的半径来做到这一点,如下图所示。棘爪释放齿轮所需的移动量约为0.03英寸。

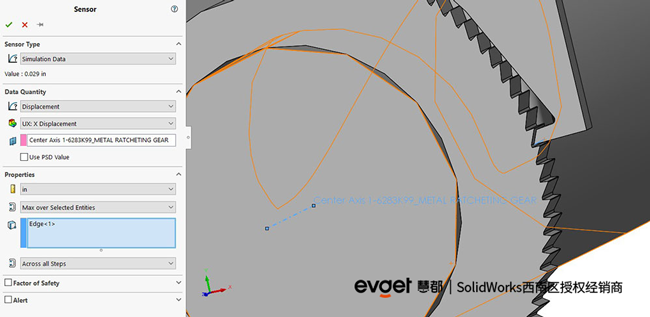
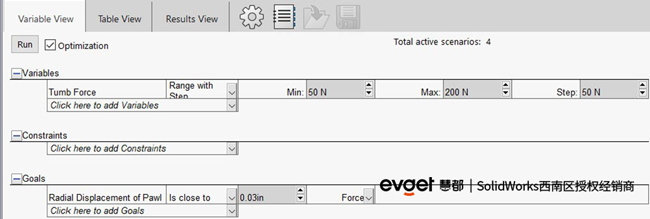
使用参数设计研究来找出需要多少力才能为棘爪释放间隙以释放齿轮。创建了一个与模拟参数关联的拇指力,并创建了一个传感器来测量从棘爪尖端到齿轮中心的径向距离。要创建可以测量径向距离的传感器或绘图,必须选择一个轴作为x方向位移的选定参考。
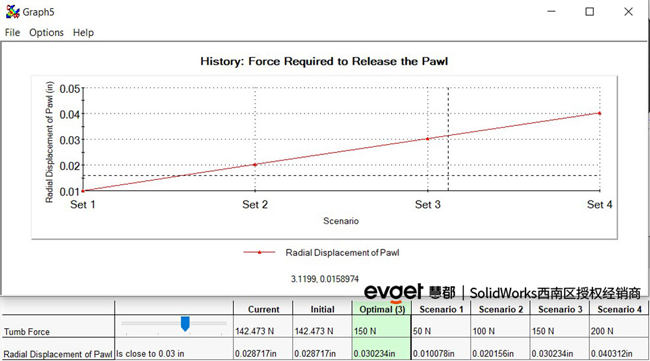
对我而言,进行设计研究是找到释放棘爪所需力量的最快方法。首先,我将拇指力在50N到200N的范围内变化,步长为50N,并将目标设定为使棘爪尖端在径向上移动0.03英寸。如下所示,该设置运行了四个方案。
设计研究使我不必进行反复试验即可找到移动棘爪所需的力。根据下图的结果,我们可以确定大约需要150 N的力才能使棘爪运动到足以释放齿轮。用人的握持力很容易达到这种力。
概要
总而言之,我们使用SOLIDWORKS Simulation来验证兼容机制。我们发现,如果将其推到极限位置,材料将不会屈服,并且人的手可以按预期释放机制。
你可以访问我们的网站获取有关SOLIDWORKS的更多信息,如果您有任何疑问,可通过慧都客服与我们联系。谢谢阅读!
慧都科技 是 正版SOLIDWORKS 西南片区正式授权经销商,拥有负责正版SOLIDWORKS免费试用,咨询,销售,技术支持,售后于一体的专业团队,旨在为企业提供一站式的三维设计解决方案。
想了解 正版SOLIDWORKS?可以联系我们的 慧都客服~或者直接拨打023-68661681





发表评论