 023-68661681
023-68661681
 返回
返回

20世纪60年代开创的机器人技术,结合了机械工程、电子工程和计算机科学,创造出灵活的机器,能够比人类工人更有效地处理精密的职责。因此,自动化和机器人工程应运而生。
今天的机器人使用高科技设备和先进的软件,利用自动化完成越来越复杂的任务。为了实现这一目标,工程师们创造了在每个移动部件中都有控制系统的机器人。
这种较小的、分散的结构有助于突破物理极限,通过自动化使每个单元的价值最大化。对自动化机器人的需求在过去30年中推动成本下降了50%,这意味着即使是较小的企业也有能力进行投资。
机器人工程技术的进步使制造商可以用更少的工人不停地运作。工业机器人不仅能够生产更大的产量,而且也能更稳定地保持质量。
然而,创建高价值的机器人系统以满足您的需求,需要精心设计和测试,才能物有所值。
通过自动化和机器人工程减少对试验和错误的依赖

自动化和机器人技术是两个截然不同的领域。制造商需要多个团队来开发新系统并确保它们准确运行,并且此过程花费的时间越长,您需要投入的前期投资就越多。
传统上,机器人工程师使用试错法进行设计。这个过程需要很长的开发时间和多个原型来解决性能问题。
使用 CAD 简化组件设计
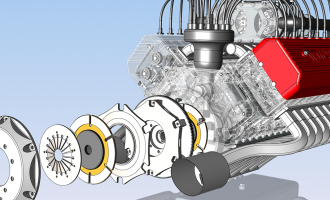
机器人依靠许多运动部件或执行器来执行任务。确定这些部件的尺寸是一个迭代的过程。
找到合适的执行器尺寸对于满足您企业的性能、尺寸和操作要求至关重要。
- 如果执行器太小,你的机器可能没有动力和扭矩来完成工作。
- 如果执行器太大,你可能会损坏部件或失去能源效率。
建模软件允许你通过使用三维CAD模型为你的设备创建一个数字孪生体来减少试验和错误的成本。你的设计团队可以通过运行模拟来测试设备,这样你就可以优化组件的尺寸并对机械系统进行调整。
通过精简的软件工程解决方案,你可以减少开发时间并削减原型设计成本。
利用自动化和机器人工程深入了解可靠性的情况
您的机器必须长期承受热和电的压力,以获得最佳的投资回报。因维修问题而停产会使你的底线受到很大影响。
外部因素的影响对工程师来说是很难准确映射的。混合建模软件允许你用CAD设计运行模拟,海量的细节显示压力的影响。
借助混合建模,你可以测试多个设计,并收集关于你的设计在长期使用中的表现的重要见解,仿真也可以帮助。
- 机器人结构分析
- 机械手的运动学和动力学
- 提高能量性能
- 精度和可重复性测试
模拟可以给你的设计团队提供宝贵的数据,帮助他们准确定位机器人的应用生命周期。这些信息将帮助您为您的投资计算出更准确的价值,并为未来的更新设定时间表。
文件转换错误会影响您的开发周期吗?
了解有效的 CAD 互操作解决方案如何:
- 减少几何错误
- 尽量减少浪费的开发资源
- 实现无缝数据共享
- 以及更多
自动化和机器人工程中控制逻辑的开发和验证
机器人技术中的自动化工程需要多个组件协同工作。由于程序逻辑连接整个单元中的多个控制器,因此它们需要单独验证并作为单个单元一起工作。
传统上,软件验证会等待原型的可用性,然后才能进行测试。此过程会在您的工作流程中造成不必要的低效率,并会增加开发时间和原型投资。
在设计阶段评估逻辑可以提高机器的准确性,降低投资风险并缩短上市时间。仿真软件可以让您通过数字原型快速访问控制逻辑验证数据,从而缩短开发时间。
提高平台互操作性
当多个团队在整个开发周期中工作时,通信和数据传输需要实时更新。在 3D 机器人软件之间传输模型可能会因复杂的工作流程和数据转换错误而陷入困境。

使用高级转换工具,您的设计团队可以在 CAD 系统之间无缝沟通和跟踪每个组件的迭代。3D InterOP为软件开发人员提供经过验证的本地数据转换解决方案,因此您可以在所有工程工作流程中集成和重用数据。
3D InterOp 还使 CAD 设计人员能够识别和隔离单个组件以进行编辑和测试,并在所有版本更新中轻松提取和复制这些更改。
与 Spatial 合作开发您的自动化和机器人工程产品
在 Spatial,我们在为制造商提供软件解决方案方面拥有 35 年的成功记录,这些解决方案经过数以千计的最终用户的测试。我们与每个可以随着市场格局发展的客户提供终身合作伙伴关系
我们的软件开发工具包为您的工程团队提供强大的 3D 建模系统,使他们可以专注于创新以满足您公司的需求,而不是从头开始。
关于3D InterOp
3D InterOp是业界领先的3D CAD数据转换软件开发工具包。它使您的客户能够轻松处理导入的3D数据,并为下游工程应用程序导出3D数据。3D InterOp的架构使用户能够优化与其3D数据的交互。3D InterOp支持所有主流的3D CAD数据格式之间的3D文件共享,这在工程应用中是非常必要的。并支持包括3D ACIS Modeler,CGM Core Modeler和Parasolid在内的任何建模器的3D CAD CAM数据交换。


发表评论